StairMaster: Learning to Conquer Risky Hollow Stairs for Agile Quadrupedal Robots
 Shanghai Jiao Tong University
Shanghai Jiao Tong University
Introduction Video
Abstract
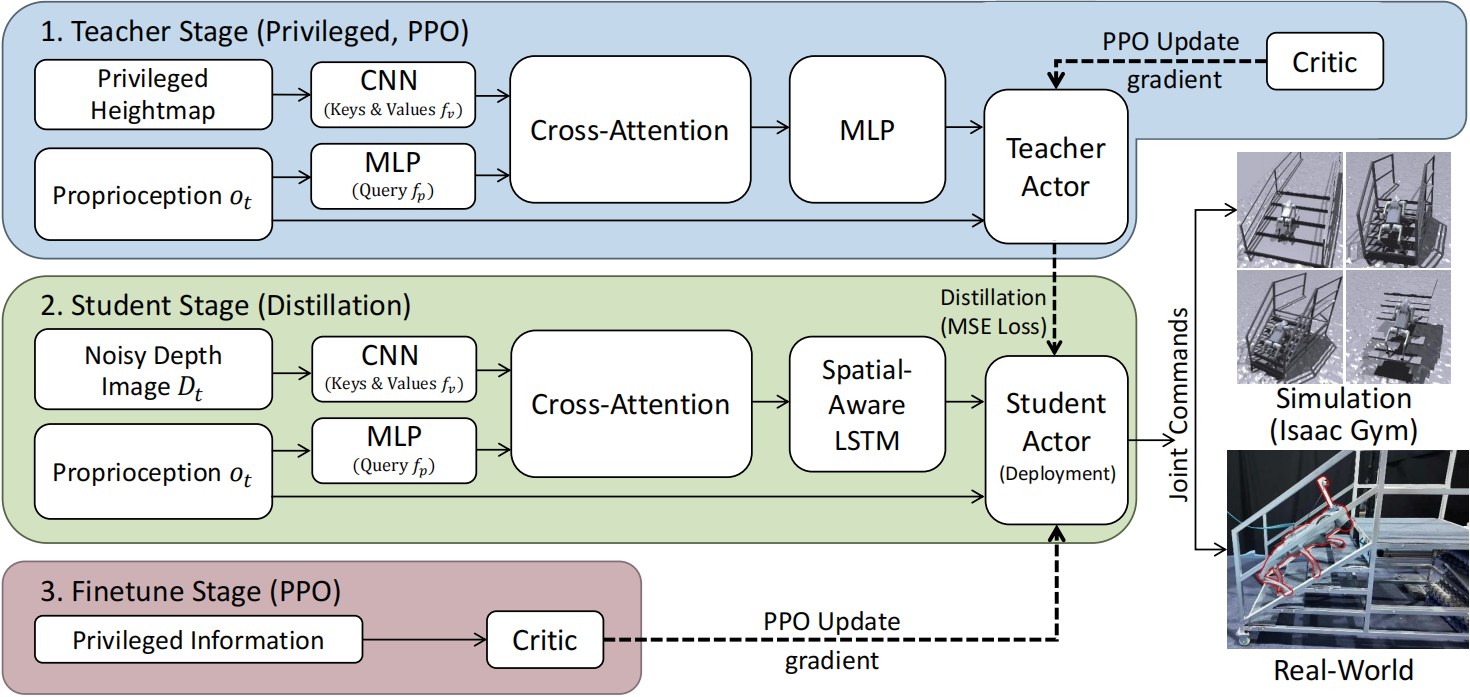
Climbing hollow stairs remains a challenging problem for quadruped robots due to the high risk of leg trapping, severe depth sparsity, and high-frequency depth-sensing noise. In this paper, we propose StairMaster, a novel three-stage reinforcement learning framework for stable locomotion on such extreme discontinuous terrains. Our architecture integrates a Cross-Attention mechanism to extract structural features from noisy depth data, alongside a Spatial-aware Recurrent Unit (SRU) that maintains robust spatio-temporal memory to mitigate perception blind spots. To bridge the sim-to-real gap in depth perception, we propose a high-fidelity sim-to-real depth sensor modeling pipeline that faithfully replicates real-world sensor artifacts. Additionally, we employ a 3D waypoint-guided active perception reward for proactive sensing, alongside hollow gap kinematic and stair edge penalties to ensure precise foothold placement. We successfully deployed StairMaster on a Unitree Go2 robot, demonstrating its ability to conquer hollow stairs with an unprecedented incline of up to 55° through zero-shot transfer. To the best of our knowledge, this is the first RL-based policy to achieve such steep hollow stair climbing in real-world environments.
Overview